
Nhu cầu tích hợp Arduino để đọc tín hiệu từ các cảm biến công nghiệp sử dụng điện áp 24V ngày càng phổ biến. Tuy nhiên, Arduino hoạt động ở mức điện áp 5V hoặc 3.3V, khiến việc đọc tín hiệu từ các cảm biến có điện áp cao hơn trở thành một thách thức. Do đó cần có một linh kiện có khả năng ” chuyển đổi ” tín hiệu 24V từ cảm biến công nghiệp sang tín hiệu 5V hoặc 3.3V để Arduino có thể tương tác một cách an toàn.
Có rất nhiều linh kiện có thể đáp ứng yêu cầu trên, tuy nhiên hôm nay tôi sẽ giới thiệu tới các một một linh kiện thông dụng, rẻ mà hiệu quả… đó chính là Optocoupler PC817.

Trước khi đi sâu vào việc tính toán, thiết kế sơ đồ nguyên lý mạch … tôi muốn các bạn xem qua một chút về datasheet của PC817 tại đây!
Nguyên lý hoạt động của PC817
PC817 là một optocoupler (cách ly quang) gồm một LED hồng ngoại ở phía đầu vào (Anode và Cathode) và một transistor quang ở phía đầu ra ( Emitter và Collector ), đặt trong cùng một vỏ bọc. Khi dòng điện chạy qua LED, nó phát ra ánh sáng hồng ngoại, ánh sáng hồng ngoại này được hấp thụ bởi transistor quang, làm cho transistor dẫn điện nối cực 3 và 4.
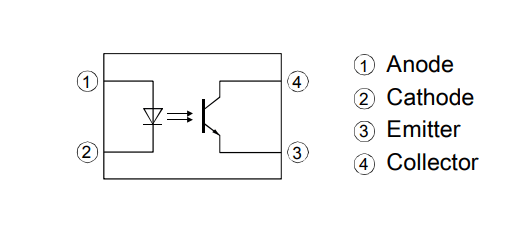
Sự kết hợp này giúp cách ly điện hoàn toàn giữa mạch đầu vào và đầu ra, bảo vệ các linh kiện nhạy cảm khỏi điện áp cao hoặc nhiễu điện. PC817 thường được sử dụng để truyền tín hiệu giữa hai mạch có mức điện áp khác nhau một cách an toàn và hiệu quả.
Tính Chọn Linh Kiện
Bản chất của công việc thiết kế nguyên lý hoạt động của mạch là đưa linh kiện vào hoạt động đúng thông số kỹ thuật mà nhà sản xuất đưa ra trong datasheet linh kiện. Việc linh kiện hoạt động đúng thông số thiết kế của nhà sản xuất giúp cho mạch hoạt động ổn định và kéo dài tuổi thọ.
1. Mạch điện cơ bản:
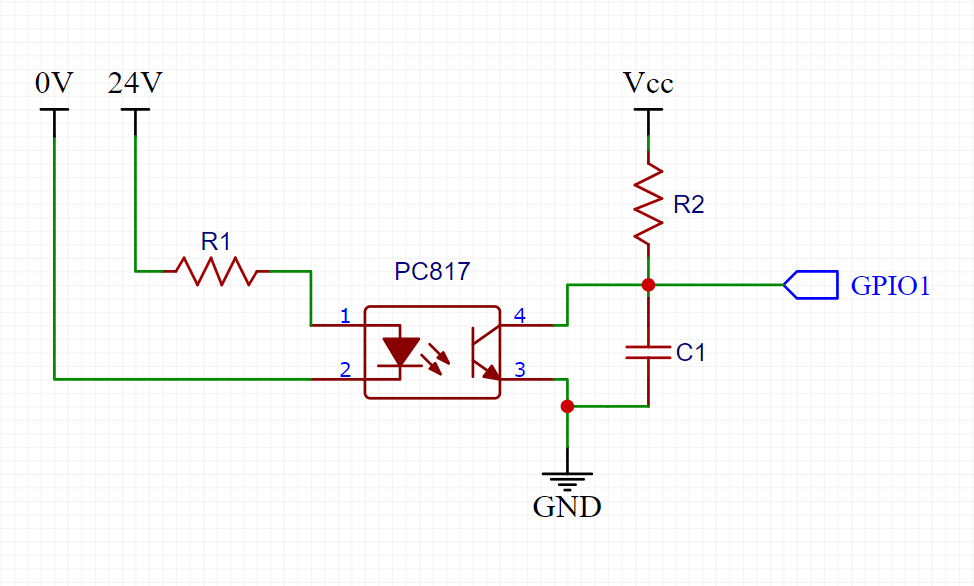
Mạch điện sử dụng PC817 cơ bản gồm điện trở R1 nối giữa nguồn V_in và chân 1 ( Anode ), chân 2 (Cathode ) của PC817 nối 0V của nguồn cấp. Chức năng của điện trở R1 là khống chế dòng điện chạy qua LED khoảng 10~20mA ( theo khuyến nghị của nhà sản xuất ).
Đầu ra của PC817 gồm 2 chân Collector (4) được nối với Vcc ( 3.3V) thông qua điện trở kéo R2, và cổng GPIO của Board mạch điều khiển. Chân Emitter (3) được nối với GND. Chức năng của điện trở Kéo Lên R2 đảm bảo trạng thái HIGH của chân GPIO khi không có dòng điện kích hoạt LED hồng ngoại hoạt động.
Để hiểu thêm về ý nghĩa của điện trở Kéo Lên R2 xin hãy đọc lại bài tham khảo tại đây !
và tụ lọc nhiễu C104 xin hãy đọc lại bài tham khảo tại đây !
2. Phân tích đầu vào của PC817
R1 được xác định theo công thức:
Trong đó:
I_ f: Dòng điện tối ưu cho LED (khoảng 20mA)
V_in: Điện áp tín hiệu từ cảm biến (24V) hoặc nguồn.
V_f: Điện áp rơi trên LED (khoảng 1.2V), chính là điện áp giữa 2 chân 1 và 2 của PC817.
Điện trở R1 để giới hạn dòng qua LED trong PC817:
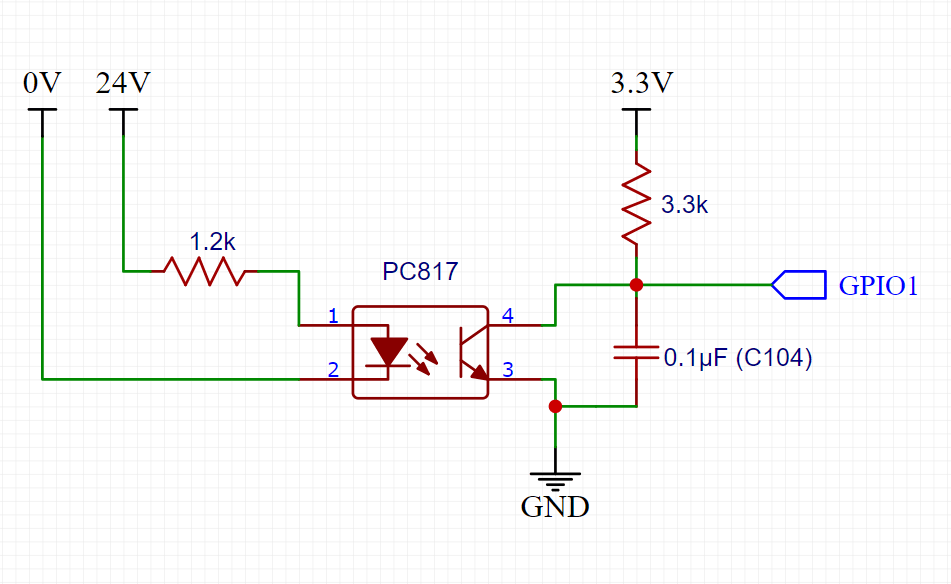
Chọn R1 = 1.2kΩ ( Theo bảng tiêu chuẩn ).
3. Phân Tích Đầu Ra của PC817
Khi LED hồng ngoại không được kích hoạt ( I_f = 0mA), nội trở giữa chân Collector và Emitter vô cùng lớn, không có dòng điện Ic chạy từ Vcc > R2 > Collector > Emitter > GND. Về bản chất thì chỉ có một dòng rò rất nhở chạy qua điện trở R2 để cung cấp điện áp tham chiếu cho chân GPIO nhận diện trạng thái HIGH.
Khi LED hồng ngoại được kích có giá trị khoảng 20mA, 2 chân 3 ( Emitter ) và 4 ( Collector) của phần Transistor sẽ hoạt động ở trạng thái bão hòa, đầu ra PC817 là hai chân Emitter và Collector hoạt động giống như 1 chiếc công tắc bán dẫn. Khi đó tồn tại dòng điện Ic chạy từ Vcc > R2 > Collector > Emitter > GND. Điện áp cả mạch sẽ chia làm 2 phần, điện áp qua điện trở và điện áp rơi trên 2 chân Collector và Emitter của PC817.
Điện trở R2 sẽ được xác định theo công thức:
I_ c: Dòng điện chạy qua mạch ở trạng thái bão hòa ( chọn 1mA =0.001A)
V_cc: Điện áp cấp cho mạch ( 3.3V )
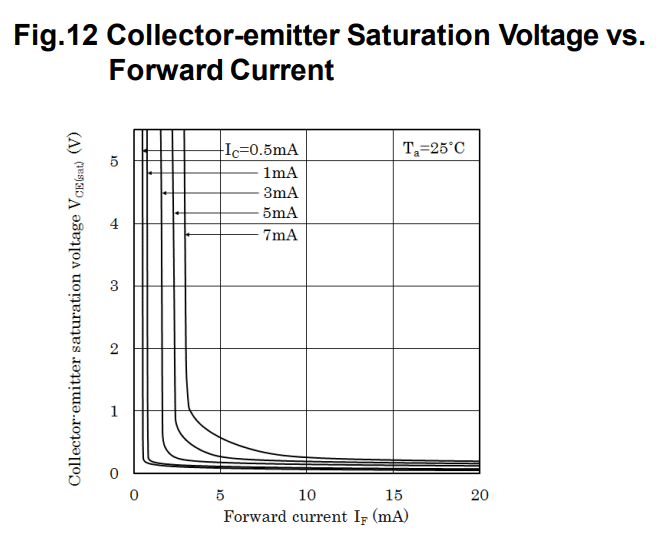
V_f: Điện áp rơi V_ce giữa 2 chân Collector và Emitter (khoảng 0.2V)
Điện trở R2 :
Chọn R2 = 3.3kΩ ( Theo bảng tiêu chuẩn ).
Ta có mạch cơ bản:
( tham khảo thêm về các trạng thái hoạt động của chất bán dẫn tại đây ! ).
Lưu ý: chân GPIO đóng vai trò giám sát điện áp LOW hoặc HIGH, nội trở của chân GPIO rất lớn ( Mega ohm ) nên hầu như không có dòng điện chạy qua chân này.
