English is below
Lưu ý: Hình ảnh được tạo bằng AI, nên có thể không mô tả đúng hình dáng thật của sản phẩm.
Khi làm việc với servo Mitsubishi, phần lớn chúng ta thường nghĩ ngay đến điều khiển bằng xung tốc độ cao, module motion hoặc các lệnh định vị chuyên dụng. Tuy nhiên trong nhiều ứng dụng thực tế, một giải pháp đơn giản hơn lại hoàn toàn đáp ứng được yêu cầu.
Gần đây tôi thử nghiệm điều khiển tốc độ động cơ servo HF-KP23B bằng chức năng xuất tín hiệu analog tích hợp trên PLC FX5U-32MR/ES.
Nguyên lý rất đơn giản:
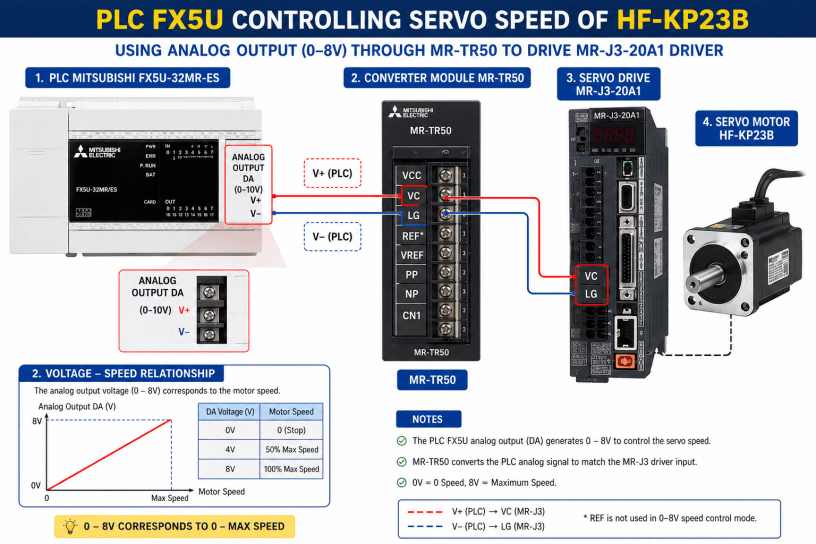
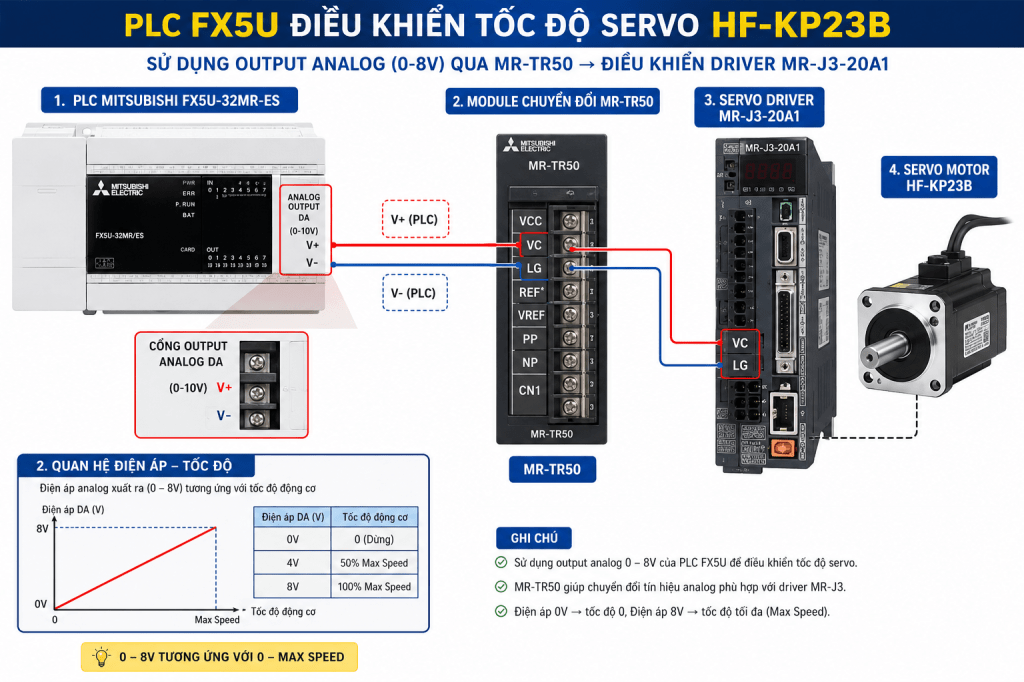
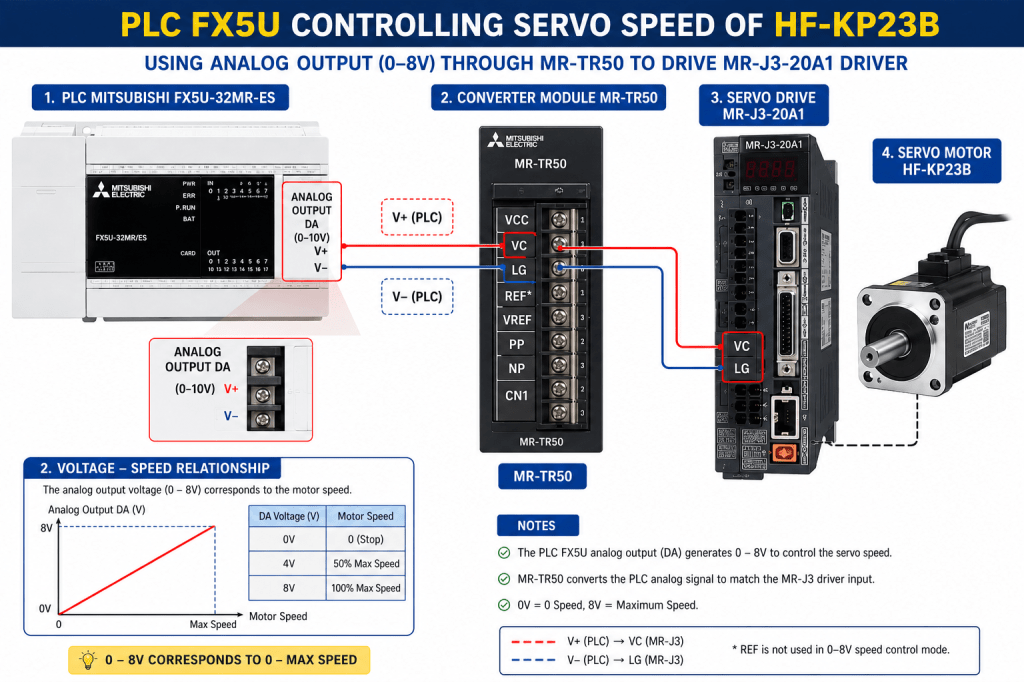
PLC xuất điện áp từ 0V đến 8V và đưa tín hiệu này đến các chân VC và LG của Driver MR-J3-20A1 thông qua terminal MR-TR50.
Sơ đồ kết nối:
- DA V+ của PLC → VC của MR-TR50 → VC của Driver
- DA V− của PLC → LG của MR-TR50 → LG của Driver
Sau khi cài đặt Driver sang chế độ điều khiển tốc độ bằng điện áp ngoài, tốc độ động cơ sẽ thay đổi tương ứng với điện áp đầu vào.
Ví dụ:
- 0V → Dừng động cơ
- 4V → Khoảng 50% tốc độ
- 8V → Tốc độ tối đa
Điểm tôi thích ở phương pháp này là sự đơn giản.
Không cần phát xung tốc độ cao.
Không cần tính toán profile tăng giảm tốc phức tạp.
Không cần cấu hình hệ thống motion control chuyên sâu.
PLC chỉ cần xuất đúng mức điện áp mong muốn là có thể điều khiển được tốc độ động cơ.
Giải pháp này đặc biệt phù hợp với:
- Băng tải
- Thiết bị thử nghiệm
- Máy mô phỏng chuyển động
- Máy kiểm tra sản phẩm
- Các dự án nghiên cứu và học tập
Trong dự án của tôi, hệ thống được sử dụng để tái hiện chuyển động của máy Press nhằm đánh giá hoạt động của các thiết bị an toàn công nghiệp. Việc sử dụng điều khiển analog giúp rút ngắn đáng kể thời gian phát triển và thử nghiệm.
Tất nhiên, điều khiển analog không phải là giải pháp thay thế cho điều khiển vị trí chính xác. Nếu ứng dụng yêu cầu định vị, nội suy, đồng bộ nhiều trục hoặc electronic gearing thì điều khiển bằng xung hoặc mạng truyền thông chuyên dụng vẫn là lựa chọn tối ưu.
Nhưng nếu mục tiêu đơn giản là điều chỉnh tốc độ động cơ một cách ổn định và dễ triển khai thì điều khiển bằng điện áp analog vẫn là một giải pháp rất đáng giá.
Hy vọng bài chia sẻ này sẽ giúp ích cho những anh em đang làm việc với PLC FX5U, Servo Mitsubishi hoặc các dự án tự động hóa tương tự.
Chúc mọi người thành công với các dự án của mình!
English
Note: The images in this article were generated using AI and may not accurately represent the actual appearance, dimensions, or physical design of the products. They are intended solely for illustration and educational purposes.
As automation engineers, we often think about controlling servo motors using pulse train outputs, positioning commands, or dedicated motion modules. However, for many practical applications, a much simpler solution can be surprisingly effective.
Recently, I experimented with controlling the speed of a Mitsubishi HF-KP23B servo motor using the built-in analog output function of an FX5U-32MR/ES PLC. The goal was straightforward: create a low-cost and easy-to-implement speed control system without requiring high-speed pulse outputs.
The principle is simple. The FX5U generates an analog voltage signal ranging from 0V to 8V. This signal is connected to the VC and LG terminals of the MR-J3-20A1 servo driver through the MR-TR50 terminal block.
Connection:
- PLC DA V+ → MR-TR50 VC → MR-J3 VC
- PLC DA V− → MR-TR50 LG → MR-J3 LG
After configuring the driver for external analog speed control mode, the motor speed becomes proportional to the output voltage.
Typical behavior:
- 0V = Motor Stop
- 4V ≈ 50% Speed
- 8V = Maximum Speed
One advantage of this method is its simplicity. There is no need to generate pulse trains, calculate acceleration profiles, or configure complex positioning parameters. The PLC only needs to output the required analog voltage.
For applications such as:
- Conveyor speed control
- Testing equipment
- Simulation machines
- Press machine motion simulators
- Laboratory experiments
this approach can significantly reduce development time.
In my case, I am building a servo-driven press motion simulator for evaluating industrial safety devices. The analog control method allowed me to quickly adjust operating speed and verify system performance without implementing a complete motion-control architecture.
Of course, analog speed control is not intended to replace positioning control. If your application requires precise positioning, electronic gearing, interpolation, or synchronized motion, pulse train or network-based motion control remains the better choice.
However, if your primary requirement is simply to adjust motor speed smoothly and reliably, analog control remains a practical and elegant solution even today.
I hope this project can provide useful ideas for engineers working with Mitsubishi PLCs and servo systems.
Happy engineering!
